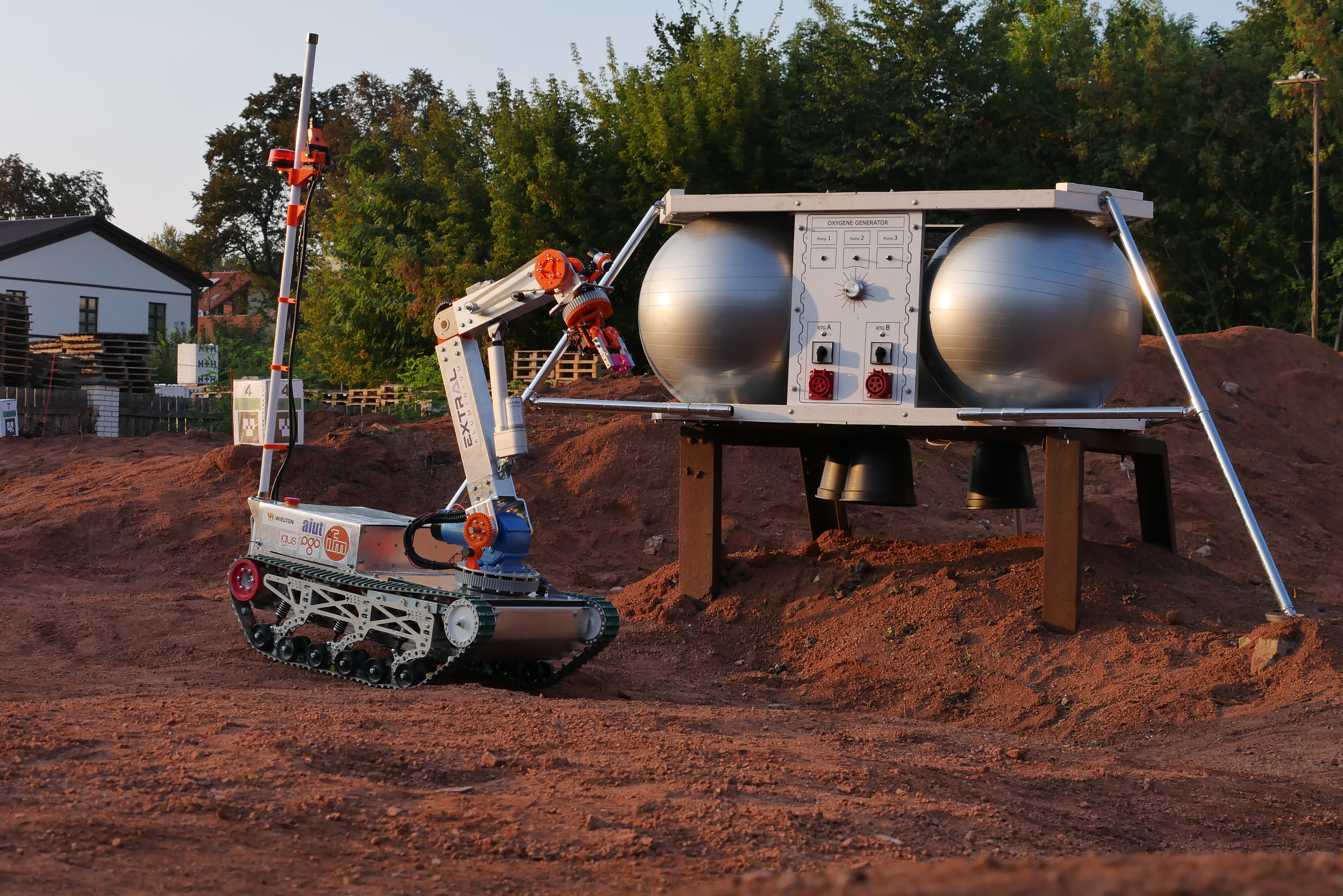
Silesian Phoenix to drużyna, którą tworzą studenci należący do międzywydziałowego SKN Zastosowania Metod Sztucznej Inteligencji AI - METH. Zespół prowadzi prace nad wielozadaniową autonomiczną platformą mobilną. Jednym z jej zastosowań jest jednostka marsjańska - łazik marsjański. Ta część projektu tworzona jest z myślą o braniu udział w międzynarodowych zawodach European Rover Challenge.

Jakub Gurgul
Kierownik sekcji programistycznejLider zespołu

Andrzej Jałowiecki
Opiekun Projektu
Patryk Stawczyk
Kierownik sekcji mechanicznej
Szymon Bogacki
Kierownik sekcji elektornicznej
Jakub Bręczewski
Kierownik sekcji naukowej
Witold Krafczyk
Programista
Rafał Zientek
Mechanik
Radosław Kępa
Mechanik
Jerzy Bieniek
Mechanik
Bartosz Bdzionek
Mechanik
Wojciech Łoziński
Programista
Oskar Górka
Mechanik
Jakub Grabowski
Mechanik

Prof. dr hab. Wojciech Moczulski

Dr hab. inż. Piotr Przystałka, prof. PŚ

Dr inż. Wawrzyniec Panfil

Projekt został zrealizowany w ramach programu Inicjatywa Doskonałości – Uczelnia Badawcza. Celem była budowa demonstratora robota mobilnego umożliwiającego neutralizację i zwalczanie wirusów różnego typu, w tym koronawirusa SARS-Cov-2, który wywował pandemie w roku 2020. W wyniku przeprowadzonych prac powstał robot, który pod kontrolą operatora jest w stanie zdezynfekować wybrane miejsce w przestrzeni z wykorzystaniem specjalistycznego środka chemicznego, tak aby zniwelować ryzyko rozpowszechniania się wirusa. Czynności dezynfekujące mogą być przeprowadzane na dwa sposoby. Pierwszy z nich zakłada wykorzystanie czterech dysz umieszczonych na przedniej części korpusu łazika, pozwalających za pomocą mgiełki na odkażanie pasma powierzchni płaskiej o szerokości ok. 1 metra podczas jazdy robota. Natomiast drugi wykorzystuje oddzielną dyszę kierunkową, umieszczoną na ramieniu robotycznym.
Nad projektem pracował zespół w składzie: Przemysław Olszówka (lider, układ komunikacji, układ wizji, układy elektroniczne); Marcin Nagi (układ sterowania); Artur Wycisk (układ mechaniczny modułu dezynfekcji); Dominika Limanówka (układ sterowania modułu dezynfekcji); Witold Krafczyk i Michał Froń (organizacja projektu) oraz Opiekunowie.

Silesian Phoenix w 2020
W roku 2020 zespół pracował nad kolejną wersją prototypu łazika marsjańskiego, Phoenix III. Ze względu na panującą sytuację na świecie, zawody European Rover Challenge 2020 odbywały się w nowej, hybrydowej formule, w podczas których zawodnicy musieli zdalnie sterować robotem, poruszającym się fizycznie po torze zlokalizowanym w Polsce. Taka formuła wymagała wiele pracy od zespołu programistów, jednak ocenie podlegał również projekt rzeczywistego prototypu. Ostatecznie zespół Silesian Phoenix zajął 12 miejsce.
Nad projektem robota w roku 2020 pracowała drużyna w składzie: Michał Froń (lider, organizacja); Witold Krafczyk (wicelider, główny programista); Wojciech Pyka (główny mechanik); Dominika Limanówka (oprogramowanie); Przemysław Olszówka (układy komunikacyjne i wizyjne); Marcin Nagi (oprogramowanie); Wojciech Nitka (układy mechaniczne); Marcin Krawczyk (układy komunikacyjne); Igor Puchała (układy elektroniczne); Krzysztof Sterna (układy mechaniczne); Tadeusz Caban (układy mechaniczne) oraz Opiekunowie.

Phoenix II
Prototyp łazika marsjańskiego skonstruowany na zawody European Rover Challenge w 2019 roku. Doświadczenie ze startu w poprzedniej edycji zaowocowało projektem zupełnie nowego robota. Zmiany wprowadzone w tej wersji robota:
- nowe podwozie, typowe dla tego typu platform,
- nowe rozwiązanie układu do pobierania próbek, które zostało dodatkowo zgłoszone w urzędzie patentowym,
- nowy manipulator, ze zminimalizowaną masą przy zachowanych osiągach w porównaniu do poprzedniego,
- przeprojektowany cały układ sterowania i komunikacji.
- zastosowanie przemysłowego PLC, odpowiadającego za sterowanie podwoziem prototypu.
Nad robotem pracowała drużyna w składzie: Marcin Nagi (lider, panel GUI); Przemysław Olszówka (wicelider, mechanika); Mariusz Lenczyk (wizja, oprogramowanie manipulatora); Tadeusz Caban (układ mechaniczny manipulatora); Jan Pytlewski (układ komunikacji, układy elektroniczne); Sebastian Środecki (komunikacja); Kamil Bugdoł (układ sterowania oparty o PLC); Igor Puchała (układ elektroniczny laboratorium próbek); Krzysztof Sterna (układ mechaniczny laboratorium próbek); Witold Krafczyk (oprogramowanie); Wojciech Pyka (mechanika podwozia); Michał Froń (element wykonawczy manipulatora); Marcin Jureczko (analizy dynamiczne); Tomasz Waleczek, Wojciech Nitka, Kamil Bobrowski (pomoc przy mechanice); Marcin Krawczyk (pomoc przy układach komunikacji); Karolina Wawrzonowska (projekty graficzne) oraz Opiekunowie.

Phoenix I
Prototyp łazika marsjańskiego, którym rozpoczynaliśmy przygodę z zawodami European Rover Challenge w 2018 roku. W związku z debiutem, nasze oczekiwania wobec robota nie były wygórowane - naszym celem było przejść pozytywnie przez wszystkie etapy kwalifikacji i wystartować w finale tego konkursu. Nie ukrywamy, że rezultat końcowy przerósł nasze oczekiwania i nasz robot, wśród 65 zespołów z 20 krajów, zajął 19. miejsce.
Nad robotem pracowała drużyna w składzie: Mariusz Lenczyk (lider, oprogramowanie manipulatora), Tadeusz Caban (wicelider, układ mechaniczny manipulatora) Jan Pytlewski (układ komunikacji, układy elektroniczne), Kamil Bugdoł (układy elektroniczne), Przemysław Olszówska (laboratorium próbek), Marcin Nagi (organizacja, laboratorium próbek), Tomasz Bieniek (programowanie), Wojciech Pyka (mechanika), Michał Froń (mechanika), Michał Nowak (programowanie), Marcin Krawczyk (programowanie), Karolina Wawrzonowska (projekty graficzne), Arkadiusz Czerwiński (organizacja) oraz Opiekunowie.
- Prace badawcze i dydaktyczne
- Publikacje
- Projekty inżynierskie
- Prace dyplomowe magisterskie
- Patenty i wnioski patentowe
- Project Based Learning - Politechnika Śląska
- Inicjatywy Doskonałości - Politechnika Śląska
- Autonomiczna, wielozadaniowa grupa energooszczędnych robotów mobilnych, "Najlepsi z Najlepszych! 4.0", Program Operacyjny Wiedza Edukacja Rozwój 2014-2020;
- Demonstrator mobilnego robota dezynfekującego. Grant w ramach I konkursu o przyznanie finansowania projektów studenckich kół naukowych, Program PŚ „Inicjatywa Doskonałości – Uczelnia Badawcza”;
- Badania porównawcze dwóch prototypów zintegrowanego układu napędowego dedykowanego do robota eksploracyjnego. Grant w ramach III konkursu o przyznanie finansowania projektów studenckich kół naukowych, Program PŚ „Inicjatywa Doskonałości – Uczelnia Badawcza”;
- Budowa i badania systemu wizyjnego dedykowanego do łazika marsjańskiego Silesian Phoenix III. Grant w ramach III konkursu o przyznanie finansowania projektów studenckich kół naukowych, Program PŚ „Inicjatywa Doskonałości – Uczelnia Badawcza”;
- Rozwój podzespołów wykonywanych w technologii FDM druku 3D dedykowanych dla robota Eksploracyjnego. Grant w ramach III konkursu o przyznanie finansowania projektów studenckich kół naukowych, Program PŚ „Inicjatywa Doskonałości – Uczelnia Badawcza”;
Publikacja
Publikacja
Publikacja
Publikacja
Prezentacja Zapis wideo
Prezentacja Zapis wideo
Prezentacja Zapis wideo
Prezentacja Agenda
Publikacja
Publikacja
Publikacja
Publikacja
- mgr inż. P. Olszówka: Układ komunikacji i system wizyjny mobilnego robota dezynfekującego, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2021”, Gliwice, str. 81-84.
Publikacja
- inż. W. Pyka: Porównawcze badanie wytrzymałościowe dwóch prototypów serwonapędu cykloidalnego, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2021”, Gliwice, str. 113-116.
Publikacja
- inż. W. Nitka: Model i analiza koła robota eksploracyjnego, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2021”, Gliwice, str. 77-80.
Publikacja
- inż. M. Froń: Prototyp chwytaka robota eksploracyjnego, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2021”, Gliwice, str. 25-28.
Prezentacja Zapis wideo
- mgr inż. K. Sterna, inż. I. Puchała: Konstrukcja zautomatyzowanego układu przeznaczonego do pobierania i analizy próbek gruntu stanowiąca moduł robota eksploracyjnego, I Studencka Konferencja Kosmiczna, Gdańsk 2020.
Prezentacja Zapis wideo
- mgr inż. M. Kleinert, W. Krafczyk: Symulator robota Silesian Phoenix I, I Studencka Konferencja Kosmiczna, Gdańsk 2020.
Prezentacja Zapis wideo
- M. Froń, W. Nitka: Prototyp chwytaka do analoga łazika marsjańskiego Phoenix III, I Studencka Konferencja Kosmiczna, Gdańsk 2020.
Prezentacja Agenda
- dr hab. inż. P. Przystałka, prof. PŚ; dr inż. W. Panfil; członkowie SKN AI-METH; M. Froń: Zagadnienia projektowania robota eksploracyjnego Silesian Phoenix, Priority Research Area 5 – Automation of Processes and Industry 4.0 Vth Thematic Conference, Gliwice 2020.
Publikacja
- M. Jureczko: Dynamic analysis of the exploration robot chassis in CoppeliaSim software, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2020”, Gliwice, str. 49-52.
Publikacja
- M. Nagi: Aplikacja operatora robota eksploracyjnego, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2020”, Gliwice, str. 85-88.
Publikacja
- P. Olszówka: Modernizacja manipulatora robota eksploracyjnego, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2020”, Gliwice, str. 97-100.
Publikacja
- W. Pyka, J. Bręczewski: A prototype mobile platform of analog Mars exploration rover, Studencka Konferencja Naukowa „METODY KOMPUTEROWE – 2020”, Gliwice, str. 121-124.
Prezentacja
Prezentacja
Prezentacja
Prezentacja
Prezentacja
Prezentacja
Prezentacja
Prezentacja
Prezentacja
Prezentacja
Prezentacja
- "Modernizacja i badania jej wpływu na własności eksploatacyjne prototypu serwonapędu cykloidalnego dla robota mobilnego" autor Wojciech Pyka, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "Modernizacja układu sterowania robota eksploracyjnego" autor Witold Krafczyk, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "Model i analiza koła napędowego robota eksploatacyjnego" autor Wojciech Nitka, opiekun dr hab. inż. Grzegorz Kokot, prof. PŚ.
Prezentacja
- "Prototyp chwytaka do manipulatora robota eksploracyjnego" autor Michał Froń, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "Aplikacja operatora robota eksploracyjnego" autor Marcin Nagi, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "Prototyp manipulatora do robota eksploracyjnego" autor Tadeusz Caban, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "Analiza dynamiczna pojazdu z zawieszeniem przegubowym" autor Marcin Jureczko, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "System sterowania podwoziem robota eksploracyjnego w oparciu o framework ROS" autor Mariusz Lenczyk, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "System monitorowania i raportowania przebiegu misji robota eksploracyjnego" autor Sebastian Środecki, promotor dr inż. Dariusz Myszor.
Prezentacja
- "Modernizacja manipulatora robota eksploracyjnego" autor Przemysław Olszówka, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "Projekt stanowiska do prowadzenia badań testowych układu pobierania próbek gleby do robota eksploracyjnego" autor Tomasz Waleczek, opiekun dr inż. Dominik Wachla.
- "Inteligentny przetwornik pomiarowy" autor Jan Pytlewski, opiekun dr inż. Józef Wiora.
Prezentacja Film
Prezentacja Film
Prezentacja
Prezentacja
- "Wizyjny system lokalizacji i klasyfikacji obiektów dedykowany do robota eksploracyjnego" autor inż. Michał Sobczyk, promotor dr hab. inż. Piotr Przystałka, prof. PŚ.
Prezentacja Film
- "Symulator robota eksploracyjnego" autor inż. Michał Kleinert, promotor dr hab. inż. Piotr Przystałka, prof. PŚ.
Prezentacja
- "System sterowania robota eksploracyjnego bazujący na programowalnym sterowniku logicznym" autor inż. Kamil Bugdoł, promotor dr inż. Piotr Michalski, opiekun dr inż. Wawrzyniec Panfil.
Prezentacja
- "Projekt platformy jezdnej łazika marsjańskiego" autor inż. Kamil Golczyński, promotor dr inż. Wawrzyniec Panfil.
- "Konstrukcja zautomatyzowanego układu pobierania i analizy próbek gleby do robota eksploracyjnego Phoenix II" autor inż. Krzysztof Sterna, promotor dr inż. Dominik Wachla.
- K. Sterna, T. Waleczek, D. Wachla, W. Panfil, P. Przystałka: "Układ pobierania i magazynowania powierzchniowych próbek gruntu z zachowaniem warstwowości, zwłaszcza do robota eksploracyjnego oraz sposób jego realizacji"- nr zgłoszenia w UPRP P.431157, dn. 16.09.2019.
Raport
- System wibroizolacji nadwozia łazika planetarnego Phoenix III
Raport
- Opracowanie systemu wizji do zastosowania w międzyplanetarnym łaziku Phoenix III
Śląskie 4 You: Silesian Phoenix
Studenci Politechniki Śląskiej zaprojektowali marsjańskiego łazika.
Grupa Wyszehradzka w biznesowym wydaniu
TVP 3 Katowice: Aktualności, 18.12.2020, godz. 21.30
polishscience.pl
forumakademickie.pl
portalsamorzadowy.pl
regiony.tvp.pl
dziennikzachodni.pl
RMF24.pl
www.tal-com.com
naukawpolsce.pap.pl
eska.pl
iKnurow.pl
tubaGliwic.pl
gzmetropolia.pl
radioCCM.pl
radioPiekary.pl
dlahandlu.pl
nowinygliwice.pl
kolumna24.pl
TVS.pl
radioFest.pl
gliwice.naszemiasto.pl
silesia.info.pl
dentonet.pl
se.pl
doxa.fm
wykop.pl
 ERC 2019
ERC 2019









































Serdecznie dziękujemy za stałą współpracę z organizacją Interfaces, działającą przy Wydziale Architektury Politechniki Śląskiej. Od początku powstania naszego projektu wspiera nasze działania w zakresie tworzenia wszelkiego rodzaju grafik, wizualizacji, renderów oraz innych materiałów reklamowych, przez osobę Karoliny Wawrzonowskiej. W ramach wzajemnej kooperacji w 2018 roku został przeprowadzony konkurs na designerską obudowę łazika Outer Space Design, w wyniku którego powstało wiele ciekawych i inspirujących prac. Niezmiernie się cieszymy z możliwości ciągłej współpracy i wzajemnego rozwoju!
 Outer Space Design
Outer Space Design




- dr inż. D. Wójcik: wsparcie merytoryczne oraz pomoc przy pomiarze widma emisji radiowej,
- dr inż. M. Surma: wsparcie merytoryczne oraz pomoc przy pomiarze widma emisji radiowej,
- dr inż. R. Kmieciak: wsparcie organizacyjne poprzez usprawnienie dostępu do pracowni w CNT,
- dr inż. P. Michalski: wsparcie merytoryczne oraz pomoc w zakresie układów automatyki,
- dr inż. D. Myszor: wsparcie merytoryczne oraz pomoc w zakresie IT,
- dr inż. K. Lis: wsparcie merytoryczne oraz pomoc w zakresie technologii wytwarzania,
- dr inż. M. Januszka: wsparcie w zakresie nawiązania współpracy z firmą WIELTON S.A.,
- mgr inż. P. Olszówka: były lider zespołu, kluczowa rola w realizacji projektu Demonstrator Mobilnego Robota Dezynfekującego,
- mgr inż. M. Nagi: były lider zespołu, kluczowa rola w realizacji projektu Demonstrator Mobilnego Robota Dezynfekującego,
- mgr A. Fryda: wsparcie organizacyjne w zakresie umów sponsorskich i spraw finansowych,
- mgr inż. A. Jałowiecki: wsparcie merytoryczne oraz pomoc w zakresie druku 3D,
- mgr inż. M. Banach: wsparcie merytoryczne oraz pomoc w rozwoju oprogramowania,
- mgr inż. A. Najewski: wsparcie merytoryczne oraz projekt MTR, który był podstawą do podwozia Phoenix I,
- mgr inż. K. Bugdoł: wsparcie merytoryczne w zakresie elektroniki; były członek zespołu,
- inż. M. Lenczyk: były lider zespołu, wsparcie merytoryczne w oprogramowaniu,
- inż. T. Waleczek: wsparcie merytoryczne w zakresie mechaniki,
- inż. J. Pytlewski: wsparcie merytoryczne w elektronice i komunikacji, były członek zespołu,
- inż. M. Kobielski: wsparcie podczas wydarzeń.