Projekt Quadrocopter
Celem projektu było opracowanie stanowiska laboratoryjnego do badania systemów sterowania wielowirnikowych bezzałogowych obiektów latających. Docelowo systemów sterowania tolerujących uszkodzenia.
Podział prac obejmował:
- zaprojektowanie i wykonanie platformy quadrocoptera o możliwości celowego wprowadzania wybranych uszkodzeń,
- opracowanie aplikacji na urządzenie mobilne (tablet) umożliwiającej sterowanie platformą, zadawanie uszkodzeń oraz prowadzenie telemetrii,
- wykorzystanie środowiska symulacyjnego (V-REP) do testowania zachowania platformy przy wprowadzanych uszkodzeniach oraz do testowania opracowanych algorytmów sterujących.
Platforma quadrocoptera wyposażona została w układy pozwalające na wprowadzanie trzech uszkodzeń (każde innego typu): uszkodzenie fragmentu śmigła, uszkodzenie sterownika silnika, utrata komunikacji. Wykorzystując tablet jesteśmy w stanie połączyć się z symulatorem quadrocoptera. Możemy nim sterować oraz wprowadzać uszkodzenia.
Platforma quadrocoptera
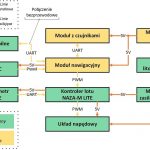
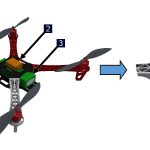
Quadrocopter został wykonany z użyciem zarówno gotowych jak i autorskich komponentów. Komponenty oznaczone jako dostępne są to układy, w które wyposażona jest większość platform multiwirnikowych. Wyjątkiem jest tutaj urządzenie mobilne, którego użycie nie byłoby możliwe bez opracowania własnych modułów. Ponieważ głównym celem pracy nie było opracowanie własnego kontrolera lotu, wykorzystano układ DJI Naza-M Lite (2). Do tego zaprojektowane zostały: moduł zasilający (4), moduł nawigacyjny (5) oraz moduł z czujnikami (6). Moduły te zaprojektowane zostały przy wykorzystaniu oprogramowania Altium Designer, a wyprodukowane dzięki uprzejmości gliwickiej firmy KONO.

Projekt Quadro 2.0
W grudniu 2018 r. rozpoczęte zostały prace nad quadrocopterem nr 2. Głównym założeniem projektu jest rozwój zainteresowań i poszerzanie wiedzy z zakresu latających pojazdów bezzałogowych. Naszym najbliższym celem jest start w Droniadzie 2019.
Dotychczasowe użyte podzespoły i technologie:
– początkowo wykorzystaliśmy ramę z poprzedniego modelu, jednakże duża liczba dodatkowych elementów zmobilizowała nas do wykonania własnej, przy pomocy technologii druku 3D
– dron został wyposażony w autopilota Pixhawk PX4, wraz z encoderem i GPS z kompasem
– sterowanie manualnego odbywa się przy pomocy aparatury FRYSky X9D
– minikomputer Raspberry Pi3 będzie służył m.in. do programowania i autonomicznego lotu – do którego użyto kompatybilnej kamery Raspberry Pi HD v2 i laserowego czujnika odległości
Nad przygotowaniami pracują studenci z różnych kierunków:
– Automatyka i Robotyka, Teleinformatyka i Informatyka – programowanie, transfer danych wraz z przetwarzaniem obrazu, wdrażanie systemów teleinformatycznych i antykolizyjnych oraz autonomiczny lot
– Mechatronika zastosowanie nowoczesnych materiałów do budowy drona i rozwiązywanie technologicznych problemów
Projekt powstaje z inicjatywy 2 studentów Politechniki Śląskiej. Obecnie zespół liczy 5 studentów, opiekunowie naukowi to prof. Pol. Śl. dr hab. inż. Piotr Przystałka oraz dr inż. Wawrzyniec Panfil.