Roboty Micromouse tworzone są z myślą o udziale w krajowych oraz międzynarodowych zawodach robotów. Ich zadaniem jest znalezienie najkrótszej drogi do środka labiryntu oraz pokonanie jej w jak najkrótszym czasie. Początki tej konkurencji sięgają końcówki lat 70 XX w. Micromouse są całkowicie autonomiczne, a poprzez wcześniejsze zapamiętanie umiejscowienia przeszkód – zdolne do pokonania labiryntu.
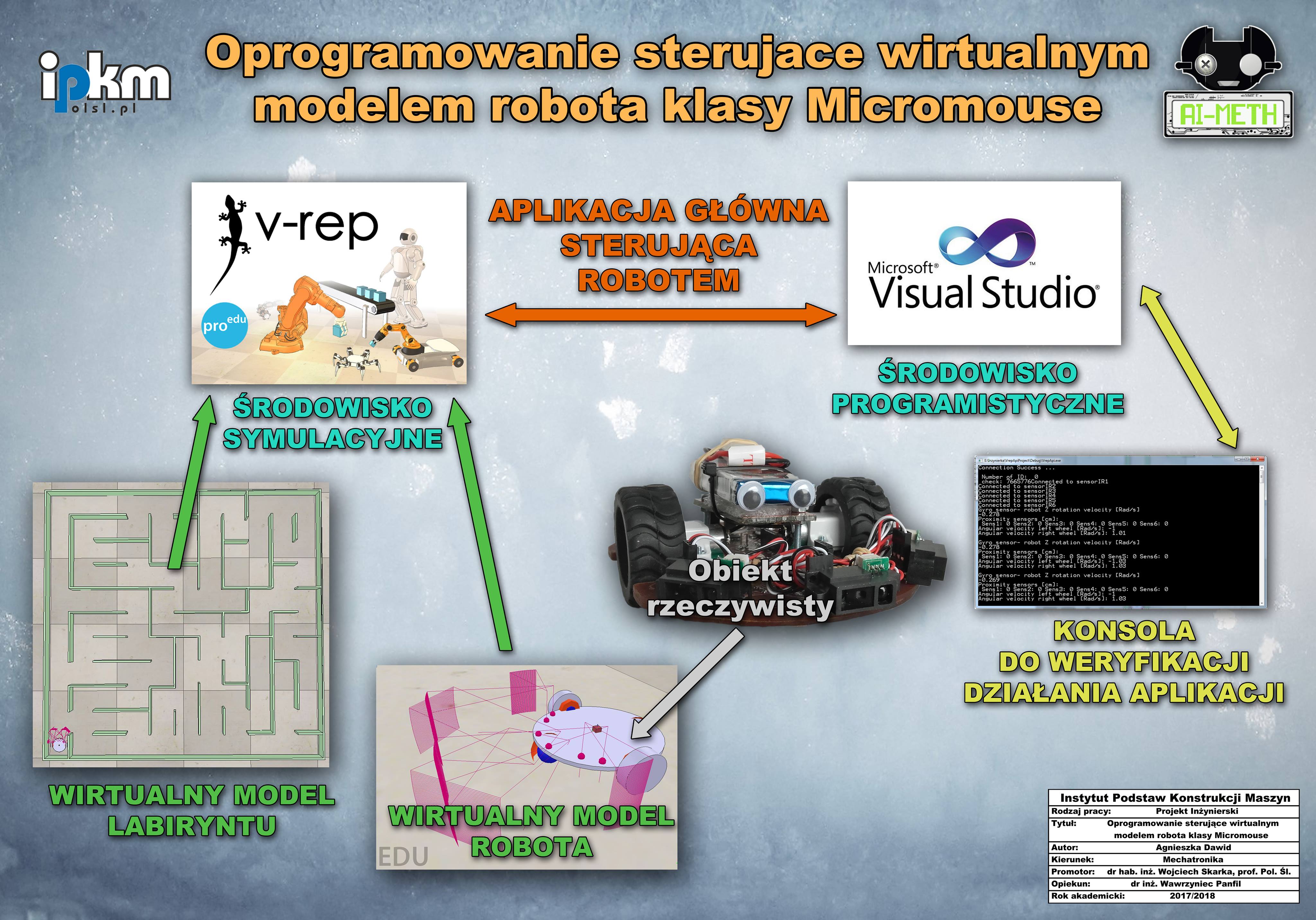
Micromouse v1
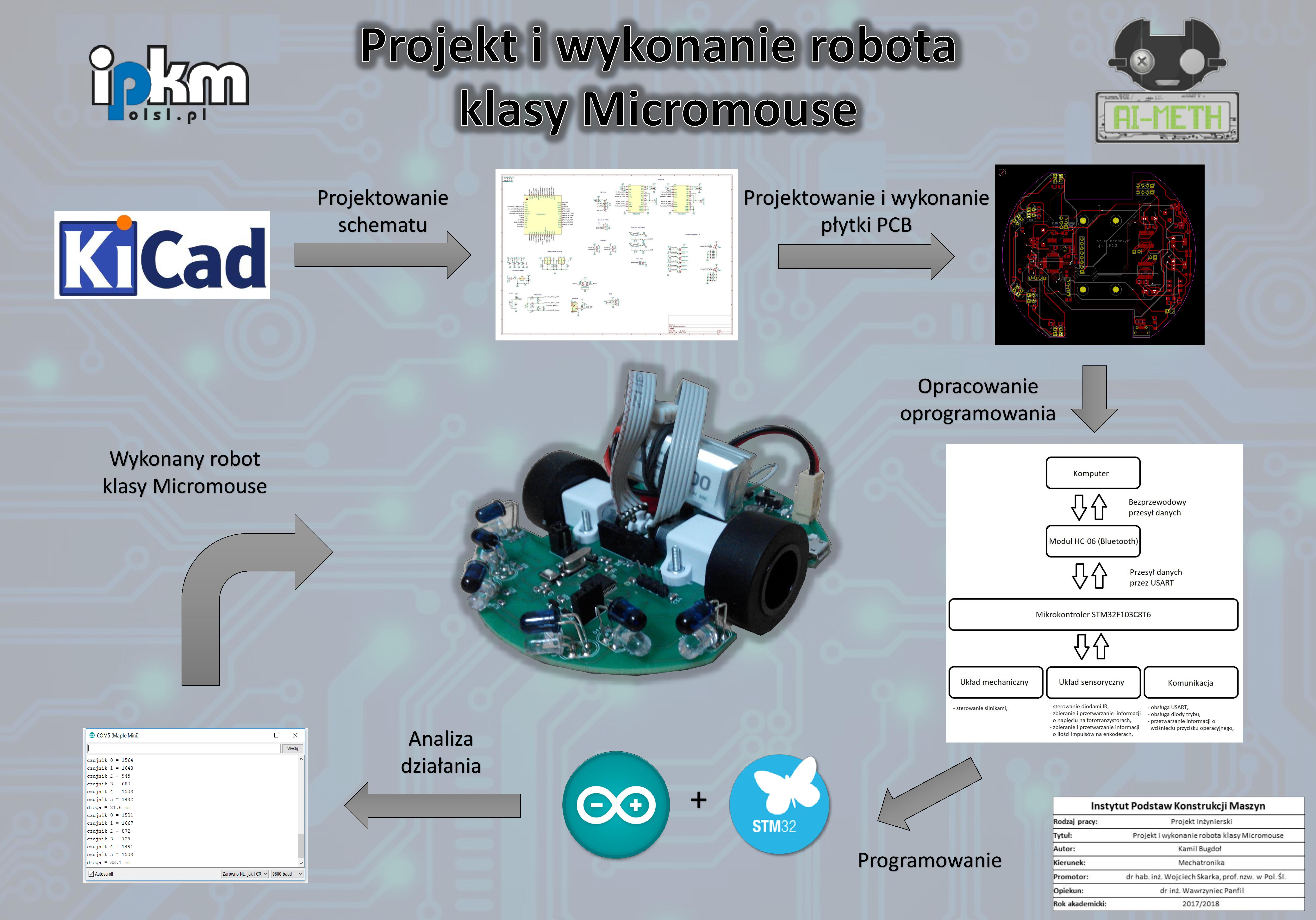
Micromouse v2
W ramach projektu robota klasy Micromouse zostały zrealizowane następujące projekty:
1. Oprogramowanie sterujące wirtualnym modelem robota klasy Micromous
2. Projekt i wykonanie robota klasy Micromouse